Ultrasonic Transit-Time Method
Engineering and Physical Principles of Non-Contact Flow Sensors
This information guide provides basic facts on engineering and physical principles of the non-invasive ultrasonic flow sensors SONOFLOW and SEMIFLOW.
Advantages of Clamp-On Sensors: Non-Invasive & Non-Intrusive
Whereas non-invasive devices do not physically affect the flowing liquid and are simply clamped from outside onto the tube, invasive devices directly affect the fluids and are thus not free of contamination.
Intrusive sensors, in turn, “intrude” into the liquid channel. This method can cause disturbances or asymmetries of the flow profile and thus corresponding with incorrect measurements.


Conclusion
SONOFLOW CO.55 and SEMIFLOW CO.65 clamp-on sensors combine the best features of being both,
non-invasive and non-intrusive.
Engineering Principles of Ultrasonic Flow Sensors
Ultrasonic transducers are the heart of any ultrasonic flow sensor. They consist of piezoelectric ceramics or composites that expand or contract when a DC voltage is applied, depending on the sign of the voltage (inverse piezoelectric effect).
By applying an alternating voltage, the piezoelectric expands and contracts periodically and emits a sound wave corresponding to the excitation frequency. This sound wave is sent out as a pulsating ultrasonic beam from an excitation transducer and is detected by a receiving transducer. The signal is evaluated electronically and output via various signal outputs (digital and analog).

Physical Principles of Ultrasonic Flow Sensors
There are different ways how ultrasonic signals can be utilized to calculate flow rates.
The SONOFLOW CO.55 and SEMIFLOW CO.65 sensors work on the basis of the transit-time difference measurement method.
This method causes neither a pressure drop in the tube nor a risk of leaks. When appropriately calibrated, transit-time can work on almost all liquids, independent of viscosity, density, color and electromagnetic properties of fluids. Ions and particulate matter are not required to calculate the measurement.
The Principle of Transit-Time Difference Measurement
How does the transit-time difference measurement actually work?
The transit-times with and against the flow direction of a medium are measured with high precision by time-to-digital converters. In the direction of flow, the transit-time of an ultrasonic wave is faster than in opposite way. It is like a sport boat, which moves with and against the flow direction of a river. A simple difference of both times allows the calculation of the flow.
Applied to SONOFLOW® CO.55 and SEMIFLOW® CO.65 Sensors
The transit-time principle is applied to the non-contact ultrasonic clamp-on sensors SONOFLOW CO.55 and SEMIFLOW CO.65. The transmitted sound waves are sloped through the liquid. In order to improve the measuring effect, two measuring parts are used.
Four ultrasonic transducers are arranged in an X-pattern. The transducers emit pulsating ultrasonic waves in a given frequency from one side to the other. The resulting transit-time difference is directly proportional to the mean flow velocity. The flow volume results from the product of this mean flow velocity and the cross-sectional area of the tubing.
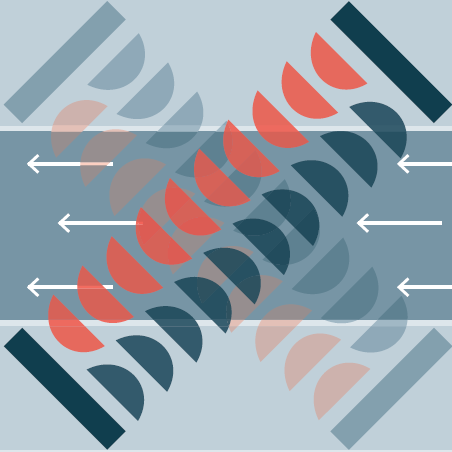
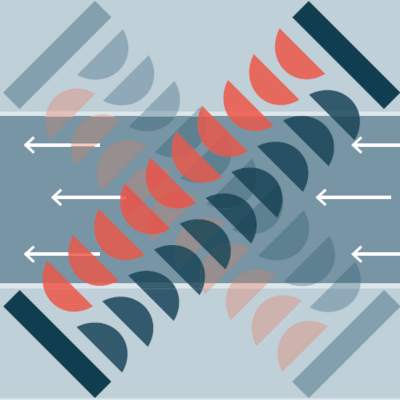
Ultrasonic Transit-Time Method: Visualization
Ultrasonic Transit-Time Method: Applied to Non-Contact Flow Meters

Video: Ultrasonic Transit-Time Method
Benefit from our clamp-on flow meters!



More Information about Ultrasonic Flow Meters
Do you have any questions?
Feel free to contact us! We will be happy to help you.

SONOTEC US Inc.
SONOTEC US Inc.
10 Newton Pl., Ste. 100
Hauppauge, New York 11788